The Main Systems Design
By Dermot Tynan, almost 13 years ago.
In terms of the system architecture, we're planning on using two separate computer control planes to manage and steer the boat from start to finish.
At the lowest level, a custom Atmel (ATmega8) board will act as a basic "autohelm", driving the boat to a specific True Wind Angle or TWA. As the breeze shifts, so too will the boat, to maintain that TWA. This is a basic PID algorithm for controlling the rudder and mainsail in relation to the specified TWA and is very similar in design and implementation to your average sailboat autohelm.

BB Phone Home.
By Dermot Tynan, almost 13 years ago.
There is a race requirement which states that "Any boat which fails to transmit for more than 10 consecutive days will be disqualified."
While there are a number of ways of reporting position data back to Mission Control, from elaborate HF transmitters through to simple satellite position locators, we'll be using a Rock Block satellite modem. These devices can send byte sequences back to dry land via the Iridium satellite network. We will be sending four updates a day, of exactly 250 bytes each. Each message will include two or more payloads.
Mother
By Dermot Tynan, almost 13 years ago.
The main computer on board Nostromo in the film Alien was called Mother. It seems only right that we should call our main processor by the same name.
Polar Curves
By Dermot Tynan, almost 13 years ago.
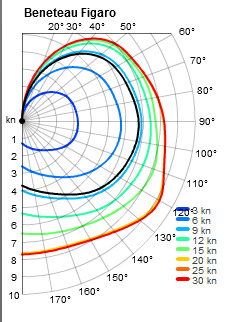
Even before a boat is built, the designers can predict how fast it will go at various sail angles. Using this information, they can make modifications to the hull to suit the type of sailing. For example, if an around-the-world race looks like it will see a lot of downwind sailing, it's possible to optimise the downwind performance, and run test simulations with the boat, before ever committing to fibreglass.
The standard mechanism for displaying this information is a polar curve. Because the boat should sail at the same speed on either tack, only one side is shown. Essentially, a polar curve allows the designer (and the boat owner) to predict the hull speed for a particular true wind angle and strength. In the example above (courtesy of SailOnline.org), you'll notice that the boats fastest speed is at a true wind angle of about 120 degrees. In the case of a 30 knot breeze (the red line), the boat should get over nine knots through the water. At TWA's of twenty degrees and less, the boat will stop, regardless of the wind speed.

Battery and Solar Design
By Dermot Tynan, almost 13 years ago.
There will be at least two Vcc busses on board. Labeled, oddly enough, as Vcc1 and Vcc2. The difference between them is that Vcc1 is always on, at all times, and Vcc2 (through VccN) are selectable by Igor.
The main processor runs off Vcc2, but Igor (and Otto) both run off Vcc1. In situations where voltage levels are critical, Vcc2 will be switched off and the boat will continue on whatever course had previously been set, until either voltage levels are healthy, the specified "wake-up" time has elapsed, or there are critical issues which require Mother to get involved. A critical situation could be something like a dramatic wind shift, or an error such as a mis-reading from a sensor.
Upcoming Missions
- Galway Bay Loop, Waiting for Vessel Availability
Search
Recent Posts
- May 2023 (1 post)
- April 2023 (1 post)
- March 2023 (1 post)
- February 2023 (2 posts)
- March 2022 (3 posts)
- March 2021 (1 post)
- August 2020 (1 post)
- May 2019 (1 post)
- April 2018 (1 post)
- November 2017 (1 post)
- April 2017 (1 post)
- November 2016 (1 post)
- September 2016 (1 post)
- August 2016 (1 post)
- January 2014 (2 posts)
- October 2013 (7 posts)
- September 2013 (1 post)
- August 2013 (3 posts)
- June 2013 (3 posts)
- May 2013 (4 posts)
- April 2013 (3 posts)
- March 2013 (9 posts)
- February 2013 (8 posts)