The Main Systems Design
By Dermot Tynan • February 20, 2013
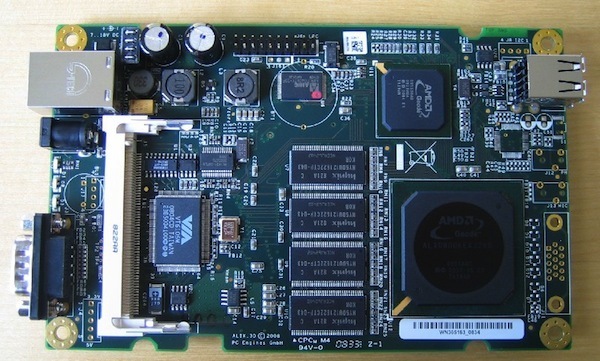
In terms of the system architecture, we're planning on using two separate computer control planes to manage and steer the boat from start to finish.
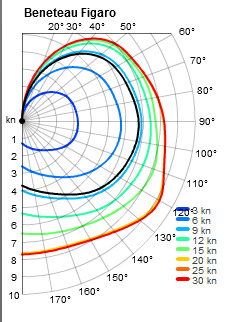
At the lowest level, a custom Atmel (ATmega8) board will act as a basic "autohelm", driving the boat to a specific True Wind Angle or TWA. As the breeze shifts, so too will the boat, to maintain that TWA. This is a basic PID algorithm for controlling the rudder and mainsail in relation to the specified TWA and is very similar in design and implementation to your average sailboat autohelm.