Mother
By Dermot Tynan • February 23, 2013
The main computer on board Nostromo in the film Alien was called Mother. It seems only right that we should call our main processor by the same name.
Explore the latest in autonomous vessels and marine research platforms.
By Dermot Tynan • February 23, 2013
The main computer on board Nostromo in the film Alien was called Mother. It seems only right that we should call our main processor by the same name.
By Dermot Tynan • March 7, 2013
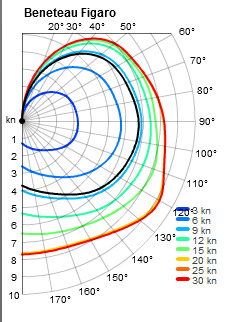
Even before a boat is built, the designers can predict how fast it will go at various sail angles. Using this information, they can make modifications to the hull to suit the type of sailing. For example, if an around-the-world race looks like it will see a lot of downwind sailing, it's possible to optimise the downwind performance, and run test simulations with the boat, before ever committing to fibreglass.
The standard mechanism for displaying this information is a polar curve. Because the boat should sail at the same speed on either tack, only one side is shown. Essentially, a polar curve allows the designer (and the boat owner) to predict the hull speed for a particular true wind angle and strength. In the example above (courtesy of SailOnline.org), you'll notice that the boats fastest speed is at a true wind angle of about 120 degrees. In the case of a 30 knot breeze (the red line), the boat should get over nine knots through the water. At TWA's of twenty degrees and less, the boat will stop, regardless of the wind speed.

By Dermot Tynan • March 19, 2013
There will be at least two Vcc busses on board. Labeled, oddly enough, as Vcc1 and Vcc2. The difference between them is that Vcc1 is always on, at all times, and Vcc2 (through VccN) are selectable by Igor.
The main processor runs off Vcc2, but Igor (and Otto) both run off Vcc1. In situations where voltage levels are critical, Vcc2 will be switched off and the boat will continue on whatever course had previously been set, until either voltage levels are healthy, the specified "wake-up" time has elapsed, or there are critical issues which require Mother to get involved. A critical situation could be something like a dramatic wind shift, or an error such as a mis-reading from a sensor.

By Dermot Tynan • March 19, 2013
I've been asked recently, about the software platforms used on board Beoga Beag. This seems as good a time as any, to talk about the various layers. As mentioned previously, the lower layer is a custom board, running an ATmega8 Atmel processor. The software (Igor and Otto) is custom-written in C for the boat.

By Dermot Tynan • March 21, 2013
This time, I set the simulation granularity a bit smaller, so the updates are more regular and there are more data points, which explains the curved route in some cases. You can click on the image for a slightly larger version. An Olympic course is known to sailors as a "triangle and sausage", because you sail upwind to the top mark, turn onto a broad reach to the gybe mark, gybe around, and broad reach down to the leeward mark. From there you beat back up to the windward mark, and then turn dead downwind to the finish line at the leeward mark. A true Olympic course would put the start and finish line about a third of the way up the beat, shortening the first leg somewhat, but also making for an upwind finish as you would have to sail around the leeward mark and beat to the finish. I skipped all that!