
The Revised Blog...
By Dermot Tynan • August 23, 2020
I am in the process of transferring the old blog posts from the old website (http://www.beogabeag.org/) to here. Please stay tuned while I get the rest of the blog posts back online.
Explore the latest in autonomous vessels and marine research platforms.
By Dermot Tynan • August 23, 2020
I am in the process of transferring the old blog posts from the old website (http://www.beogabeag.org/) to here. Please stay tuned while I get the rest of the blog posts back online.

By Dermot Tynan • May 15, 2019
Carpenters like to say "measure twice, cut once." In the software world, we make extensive use of unit tests and end-to-end tests. But the North Atlantic is no friend to small boats, and there's not a lot of end-to-end testing which can replicate the vagaries of the wild Atlantic. To that end, we use simulations. Simulators can be used to throw all kinds of real-world problems at a piece of software, and measure the response.

By Dermot Tynan • April 3, 2018
It seems straightforward enough to fill a bath. We know how to do it instinctively, but how do we program a computer to do it?
Let’s start with some assumptions. Assume we have a hot and cold tap, and we can control the flow on each tap. Also assume we can measure the average temperature of the water in the bath tub. Finally, assume we can measure the height of water in the bath. This last one is so we know when we’re done.
We’ll denote t as the measured temperature and l as the measured height of water. For that matter, we can refer to h as the amount of hot water, where 0.0 ≤ h ≤ 1.0 and c as the amount of cold water, again in the range 0.0 ≤ c ≤ 1.0.
Ultimately, we’re going to use a PID Controller to do the actual hard work of adjusting the taps. But before we get into that, we need to refine our equations just a bit, and also learn how to walk before we try to start running. (See what I did there? Running? Bath? Oh, never mind).

By Dermot Tynan • November 20, 2017
"Sailing a boat across the Atlantic is challenging enough for a human sailor. But what about a computer? BBC Future visits a sailing regatta for robots."
I'm including a link here for an interesting article published by the BBC on autonomous sailboats.
By Dermot Tynan • April 27, 2017
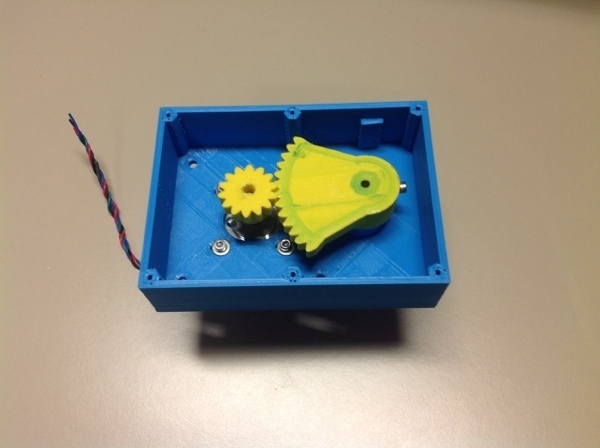
I have uploaded a video (to YouTube) of the rudder mechanism on Hull #1 working from end-stop to end-stop. (Excuse the video quality, I used my phone to record it.)
I connected an Arduino (Mega2560 if you want to know) and a SparkFun stepper controller to the stepper motor which drives the rudder. I wanted to exercise the tiller gears and the rudder shaft for a while. The video shows the rudder swinging from almost completely to Starboard, all the way back to Port.