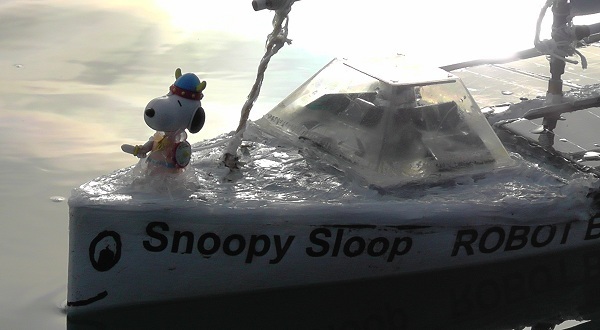
Bon Voyage, Snoopy!
By Dermot Tynan • March 23, 2013
Today, March 23rd, 2013, Team Joker are planning to launch their ninth boat, Snoopy Sloop. This has been an educational (and obviously fun!) experience for Robin Lovelock and his fleet of robotic warrior boats. Here in Beoga Beag land, we wish them well.