The Main Systems Design
By Dermot Tynan, almost 13 years ago.
In terms of the system architecture, we're planning on using two separate computer control planes to manage and steer the boat from start to finish.
At the lowest level, a custom Atmel (ATmega8) board will act as a basic "autohelm", driving the boat to a specific True Wind Angle or TWA. As the breeze shifts, so too will the boat, to maintain that TWA. This is a basic PID algorithm for controlling the rudder and mainsail in relation to the specified TWA and is very similar in design and implementation to your average sailboat autohelm.

To tack, or not to tack, that is the question...
By Dermot Tynan, almost 13 years ago.
Looking at the upper-level navigation software introduces some particularly interesting questions. The low-level software will keep the boat on a TWA, or true wind angle. Technically, it's an apparent wind angle, but that's ok.
The upper level has to decide what is the best TWA. To do this, it has the current position of the boat and the position of the next waypoint. It also knows the current TWA and the compass heading. Without bogging down in the maths, it can compute the distance and bearing to the next waypoint using something called a Haversin algorithm. Given the current TWA and the heading, it can determine the wind direction. We can compute the VMG or "velocity made good" for each new heading possibility, based on the predicted Polar (more on that anon). So, we can see that a particular heading is the best course to get us as fast as possible to the next mark. All of this is standard stuff, and is used on sailboat race courses every day.
Polar Curves
By Dermot Tynan, almost 13 years ago.
Even before a boat is built, the designers can predict how fast it will go at various sail angles. Using this information, they can make modifications to the hull to suit the type of sailing. For example, if an around-the-world race looks like it will see a lot of downwind sailing, it's possible to optimise the downwind performance, and run test simulations with the boat, before ever committing to fibreglass.
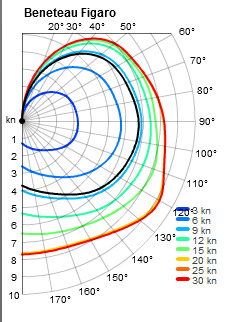
The standard mechanism for displaying this information is a polar curve. Because the boat should sail at the same speed on either tack, only one side is shown. Essentially, a polar curve allows the designer (and the boat owner) to predict the hull speed for a particular true wind angle and strength. In the example above (courtesy of SailOnline.org), you'll notice that the boats fastest speed is at a true wind angle of about 120 degrees. In the case of a 30 knot breeze (the red line), the boat should get over nine knots through the water. At TWA's of twenty degrees and less, the boat will stop, regardless of the wind speed.

Five Degrees of Wrong.
By Dermot Tynan, almost 13 years ago.
So, as I mentioned, the virtual boat was too eager to tack. If you're dead downwind of the mark, and you set off on a starboard tack, within a metre of being on the left-hand side of the course, the other tack is favoured.
I added code that essentially stated "unless the other tack is at least five degrees better than the existing one, ignore it." So, if I'm at 44 degrees TWA and the other tack is better by a degree (-43 say), stay where you are. This works quite nicely. If you look at the plotted course, it shows the boat sailing nice upwind legs, to the waypoint. As Henry would say, "it's sailing up the ladder."
Of Laylines and Beats
By Dermot Tynan, almost 13 years ago.
This time, I set the simulation granularity a bit smaller, so the updates are more regular and there are more data points, which explains the curved route in some cases. You can click on the image for a slightly larger version. An Olympic course is known to sailors as a "triangle and sausage", because you sail upwind to the top mark, turn onto a broad reach to the gybe mark, gybe around, and broad reach down to the leeward mark. From there you beat back up to the windward mark, and then turn dead downwind to the finish line at the leeward mark. A true Olympic course would put the start and finish line about a third of the way up the beat, shortening the first leg somewhat, but also making for an upwind finish as you would have to sail around the leeward mark and beat to the finish. I skipped all that!
Upcoming Missions
- Galway Bay Loop, Waiting for Vessel Availability
Search
Recent Posts
- May 2023 (1 post)
- April 2023 (1 post)
- March 2023 (1 post)
- February 2023 (2 posts)
- March 2022 (3 posts)
- March 2021 (1 post)
- August 2020 (1 post)
- May 2019 (1 post)
- April 2018 (1 post)
- November 2017 (1 post)
- April 2017 (1 post)
- November 2016 (1 post)
- September 2016 (1 post)
- August 2016 (1 post)
- January 2014 (2 posts)
- October 2013 (7 posts)
- September 2013 (1 post)
- August 2013 (3 posts)
- June 2013 (3 posts)
- May 2013 (4 posts)
- April 2013 (3 posts)
- March 2013 (9 posts)
- February 2013 (8 posts)