Rudder Movement Test
By Dermot Tynan • April 27, 2017
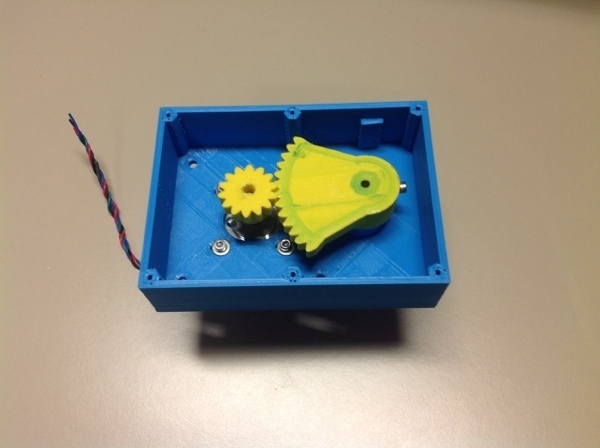
I have uploaded a video (to YouTube) of the rudder mechanism on Hull #1 working from end-stop to end-stop. (Excuse the video quality, I used my phone to record it.)
I connected an Arduino (Mega2560 if you want to know) and a SparkFun stepper controller to the stepper motor which drives the rudder. I wanted to exercise the tiller gears and the rudder shaft for a while. The video shows the rudder swinging from almost completely to Starboard, all the way back to Port.


