
Autonomous Marine Robotics
More than eighty percent of our ocean is unmapped, unobserved, and unexplored. Autonomous Sailing Platforms are the key to extensive, long-term investigation of the oceans.

Autonomous Marine Robotics
Autonomous craft can also be used for in-shore observation and bathymetry along the coast, or monitoring and measurement of aquatic life.
Kalopa Robotics
Since 2013, we have been building platforms for furthering the study of autonomous marine robotics. Our particular interest is in the field of robotic sailing as this offers the best opportunity for long-term, off-shore research. We also build research platforms to further our understanding of the marine world.
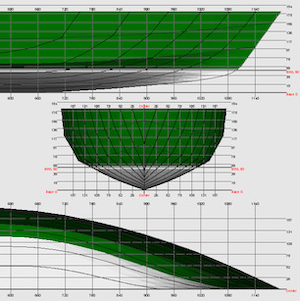
Vessels
We have designed and built a range of different platforms for marine robotics. From simple spar buoys to more complex sailboats capable of navigating across oceans without assistance. Our focus is on platforms which can operate independently for indefinite periods of time, in a hostile marine environment.
Missions
Having a collection of boats and marine platforms is of little use unless they are deployed. To this end, we maintain a series of missions ranging from simply measuring temperature and tidal data in Galway Bay through more advanced challenges such as the Microtransat.
The Oceans - Earth's Last Frontier. Unmapped, unobserved, and unexplored.
According to the US National Ocean Service, more than eighty percent of our oceans remain unmapped, unobserved, and unexplored. We know more about the surface of the moon than that of the ocean floor.
In March 1961, President John F. Kennedy said, “Knowledge of the oceans is more than a matter of curiosity. Our very survival might hinge on it.” Now, nigh on sixty years later, we have done little to improve this. As climate change impacts ocean levels and dissolved CO2 levels, and as plastic usage increases the amount of microplastics in our waters, marine research is essential.

The High Cost of Research.
Running an ocean-going research vessel can cost between €5,000 and €30,000 per day, not counting the costs of the researchers.
Crewing levels are strictly regulated, and crew costs are increasing, year on year. While a lot of marine research is "hands on", many missions do not require researchers to attend. This is where autonomous sailboats and similar research platforms can come to the fore.
The search for missing Malaysia Airlines flight MH370 was one of the largest searches in history, at an estimated cost of €133 million before being called off after 1,046 days. The search used autonomous underwater vehicles (AUV) to scan the Indian Ocean. If the AUV had not required a research vessel for support, the search may have continued and would definitely have cost a lot less.
 sailing in Galway Bay.")
The Hostile Environment.
Autonomous marine systems must be robust and to some extent, self-healing. They must be capable of dealing with salt encrustation on all surfaces above the waterline, and marine growth below the waterline. They must be capable of withstanding fierce storms, large waves, and even other vessels.
When an autonomous sailboat is one thousand miles away from land, there is no-one available to "Press OK to continue". No-one to wash salt out of the rudder actuator. No-one to retry a failed satellite communication. The vessel must be completely autonomous.
Not only does this provide numerous mechanical and engineering challenges, but the traditional approach of "turning it off and on again" doesn't work at sea.
